Der KTM xBow als Versuchsfahrzeug auf der Rennstrecke in Most.
(Bildquelle: Matthias Vodel)
Von der Straße in die Simulation
Datum: 10.09.2024 Text: Michael Walther

Das xBow Rennsportchassis mit bereits angebauter 4-Stempelanlage und Triple-Screen-Setup.
(Bildquelle: Michael Walther)

Der fertiggestellte xBow Simulator inklusive aller notwendigen Spezialanpassungen.
(Bildquelle: Michael Walther)
Es ist bereits bekannt, dass Herr Professor Matthias Vodel in dem von ihm ins Leben gerufene „Living Lab“ an der Hochschule Mittweida eine ganze Reihe unterschiedlicher Fahrsimulationskonzepte entwickelt hat. Die detailgetreue Fahrdynamik der bisherigen Simulatoren konnte neben interessierten Rennspielenthusiasten auch hochkarätige Motorsportler überzeugen. Trotz eindrucksvoller Grafik und nahezu latenzfreiem Fahrzeugfeedback lässt sich der Aufbau der einzelnen Simulatoren jedoch immer wie folgt herunter brechen: Bildschirm, Computer, Wheelbase, Lenkrad, Pedalerie und Sitz.
Dem gegenüber steht die Neuanschaffung für das Living Lab, ein echtes Rennsportchassis eines KTM xBow. Durch die langjährige Zusammenarbeit zwischen Professor Vodel und dem österreichischem Motor- und Fahrzeugbauunternehmen erhielt die Hochschule das genannte Rennsportchassis, um dieses in Forschung und Lehre einsetzen zu können. Ziel ist es, mithilfe dieser großzügigen Zuwendung seitens KTM ein möglichst immersives Simulatorkonzept zu erschaffen, welches den Nutzer die Umgebung vollständig vergessen lässt. Professor Vodel erreiche sein Ziel mit dem Simulator erst, wenn „der Benutzer vollständig davon überzeugt sei, dass er sich in einer realen Rennumgebung befindet und somit fahrlässige Unfälle auf der Rennstrecke vermeidet.“
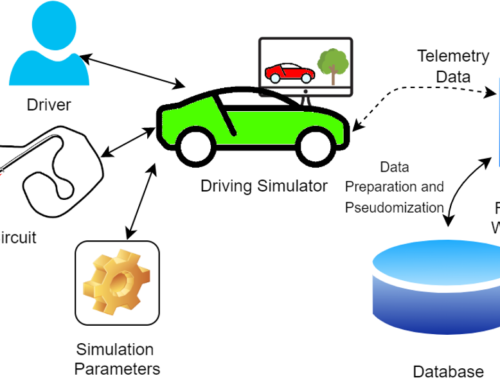
Neben dem bereitgestellten Chassis besitzt die Hochschule Mittweida bereits den KTM xBow als reales Straßenfahrzeug für Forschungs- und Entwicklungsarbeiten. Diese Gegebenheit machen sich Professor Vodel und sein Team für die Abstimmung des xBow-Simulators zunutze. In dem derzeit laufenden und von der sächsischen Aufbaubank (SAB) finanzierten Projekt „Telemetriebasierte ML-Datenanalyse & Konfigurationsmanagement im Bereich Automotive Simulation“ werden mit dem Realfahrzeug auf diversen Rennstrecken und im zivilen Straßenverkehr Telemetriedaten gesammelt, die im Nachhinein dazu dienen, ein realitätsgetreues Motionprofil für den Simulator zu erstellen.
Neben bereits bewährten Hardwarekomponenten kamen darüber hinaus eine Vielzahl eigens konstruierter und mit dem 3D-Drucker gefertigte Teile zum Einsatz. So konnten beispielsweise individuell gefertigte Türgriffe, Halterungen für die Seitenblenden, Lautsprecherhalter und Magnethaltevorrichtungen, die zum Spannen des Neoprenbezuges vorgesehen sind, geschaffen werden. Der eben angesprochene Neoprenbezug wurde ebenfalls in Eigenregie angepasst, sodass der Fahrer während der Fahrt weitestgehend von der Außenwelt abgeschirmt ist. Weiterhin wurden die restlichen lichtdurchlässigen Areale durch individuelle Zuschnitte des Neoprenstoffes eliminiert. Diese Maßnahmen sorgen dafür, dass das immersive Fahrgefühl im Vergleich zu den anderen Simulationskonzepten um einen weiteren Schritt verbessert wurde.
Keep racing!
Weitere Informationen zu den verschiedenen Simulatoren finden Sie hier: https://medieninformatik.hs-mittweida.de/living_lab/tech/
Weitere Informationen zu dem Projekt „Telemetriebasierte ML-Datenanalyse & Konfigurationsmanagement im Bereich Automotive Simulation“ finden Sie hier: https://medieninformatik.hs-mittweida.de/projekt/sabinnoteam/